

Future-IoT traditionally embeds a hackathon. You will work in teams of about 4 people overall 24h (Wed-Fri) on ten exciting challenges, pitch them on Friday in front of our expert jury, and the best project is selected.
C1: FIOT artistic speaker and audience notification
This challenge is about using specific IoT devices for signaling the speaker useful info about the currently ongoing talk.
- Hardware
- 5x WIFI ESP32 indication bars with 32 colored LEDs
- 1x IR controllable clock
- Applications
- Remaining time display: In events like or Ph.D. school, timekeeping is essential. The IoT provides a lot of interesting devices to do so. This mini project is about developing a system for announcing the remaining time. You get 5 bars with 32 colored LEDs each to show the remaining time. This device is controlled by an ESP-32 processor with wireless communication. As another device, you get a wirelessly controlled IR sender that interfaces a countdown clock. The idea is that you develop a system that takes the time and then starts a countdown showing the remaining time in minutes and seconds on the clock and the remaining time on the bars.
- For everything on top, your creativity is demanded regarding application and visualization 🙂 (BUT keep in mind that it should not distract the audience from the talk)
- e.g. current tweet rate, chat comments, voice-recognition-based info, …
C2: Electric scooter
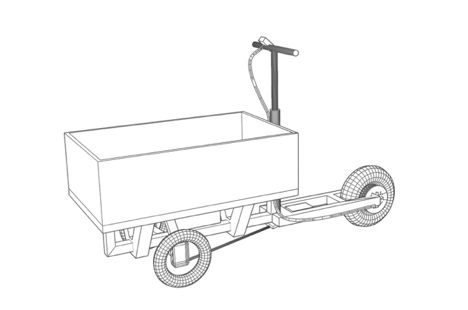
The project consists in the design and development of a light electric vehicle.
Using the fablab methodology, the aim is to build a cargo scooter as illustrated on the figure below. The different components (wheels, motor, battery, brakes, etc.) are at our disposal, and the project consists in assembling the different elements, and developing the interconnection of the digital elements, such as the motor control or the battery manager.
C3: BACnet – Smart Building management over LoRaWAN
Recently the LoRa Alliance issues a document stating that LoRaWAN can allow BACnet communications.[1]
Wikipedia gives the following definition for BACnet: BACnet was designed to allow communication of building automation and control systems for applications such as heating, ventilating, and air-conditioning control (HVAC), lighting control, access control, and fire detection systems and their associated equipment. The BACnet protocol provides mechanisms for computerized building automation devices to exchange information, regardless of the particular building service they perform.
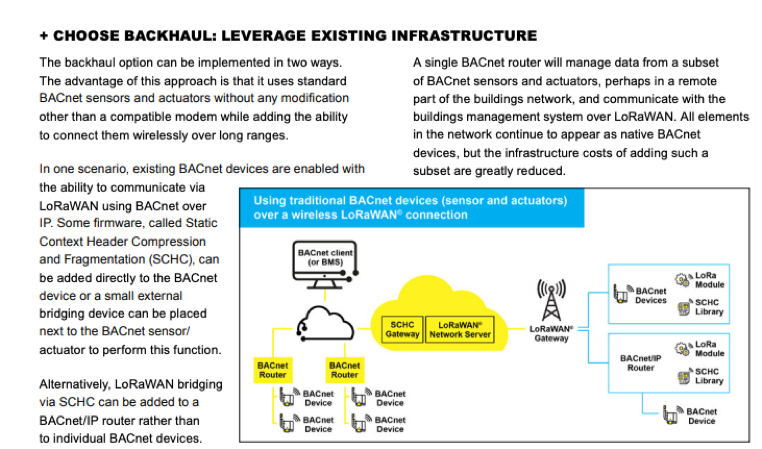
The use of LoRaWAN will extend the range of building networks and will extend device lifetime. The document promotes the usage of SCHC header compression mechanism to allow BACnet frame to be sent on LoRaWAN networks.
SCHC is a generic framework for header compression and fragmentation, designed with LPWAN in mind. IMT Atlantique contributed to its standardization at the IETF in 2020 in RFC8724.. OpenSCHC is an opensource python implementation of the SCHC protocol.
The goal of the challenge is to add some BACnet capabilities to openSCHC for testing header compression on real environment.
[1] https://lora-alliance.org/resource_hub/augmenting-bacnet-with-lorawan-wireless-iot/
C4: AI-based Data Analytics
C5: Developing an Electric Vehicle Powertrain
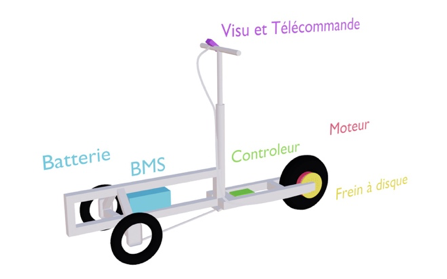
The powertrain of the electric vehicle includes all the devices which allow it to move: battery, Battery Management System (BMS), motor controller, and motor. The goal here is to continue the work on making a testbed of a powertrain based on open hardware and free software. Anyone interested in how an electric vehicle works internally is welcome to participate.
Hardware available:
- Custom motor controller board based on the VESC project <https://vesc-project.com/>.
- Custom BMS board
- DC brushless motor
- Power supplies, oscilloscope…
Software available:
- Motor controller firmware source code
- BMS firmware source code (work in progress)
Objectives:
- Configure the motor controller
- Continue the implementation of the BMS firmware
- Enable the communication between motor controller and BMS using CAN bus
Prerequisite:
- None, but it is helpful to have some embedded programming notions